近日🚇,意昂4平台醫療機器人研究院楊廣中教授在Advanced Functional Materials雜誌上發表研究論文“Microtentacle Actuators Based on Shape Memory Alloy Smart Soft Composite”🧑🏿💻。(DOI: 10.1002/adfm.202002510)
當前軟材料、新的製備技術以及連續驅動的研究不斷取得新進展,為微型機器人的研究和發展帶來新的動能🤟🏽。在需要精細操作的實際應用中🧖🏼♀️,例如顯微外科手術或者探索微小尺度生物樣品時🦻🏼,微型機器人都可得到廣泛的應用👆🏻。形狀記憶效應具有驅動機製簡單等優勢,是一種微小尺度下非常有發展前景的驅動機製。但對於亞毫米級的裝置,由於受製備工藝的限製,使用形狀記憶合金驅動器很難實現復雜且大範圍的移動。
此項研究提出了一種利用雙光子打印製備而成的小型智能軟復合驅動器的設計與製造🥴,可通過改變支架層壓的方向來改變形變模式🤥,同時通過沉積在驅動器內部的碳納米管層的局部電熱效應來控製驅動👩🏻🌾。此研究中的微驅動器設計可產生390 µN的力💆🏻,實現高達80°的彎曲角度,並展示了使用單臂和雙臂裝置來提起與抓取物體的能力。
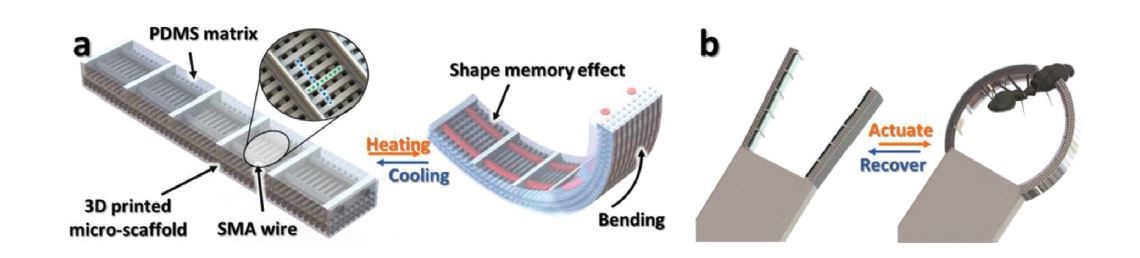
圖1 此項研究中微型軟驅動器的設計原理與工作機製
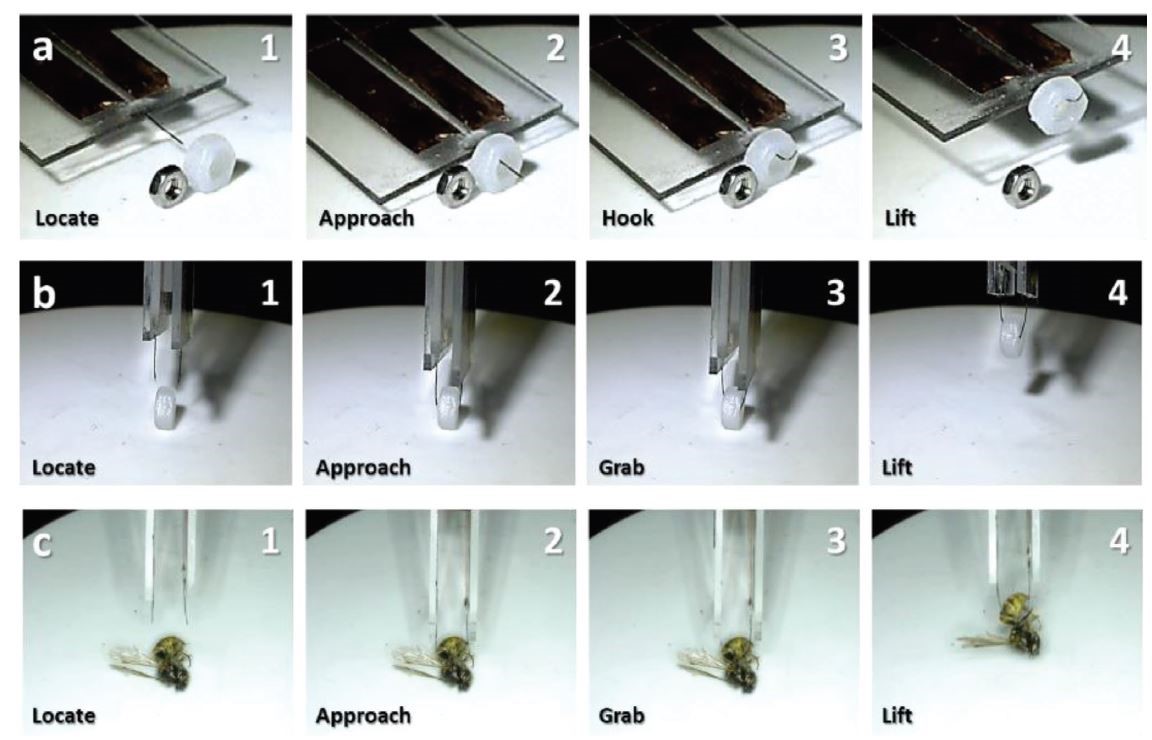
圖2 此研究中微驅動器操控物體的能力🙅♀️:可單臂提起物體,雙臂抓取並提起物體(物體重量80 mg)與抓取黃蜂,並不會對抓取物帶來任何的損傷
論文鏈接:https://doi.org/10.1002/adfm.202002510









